Systems Design State-of-the-art robotics solutions
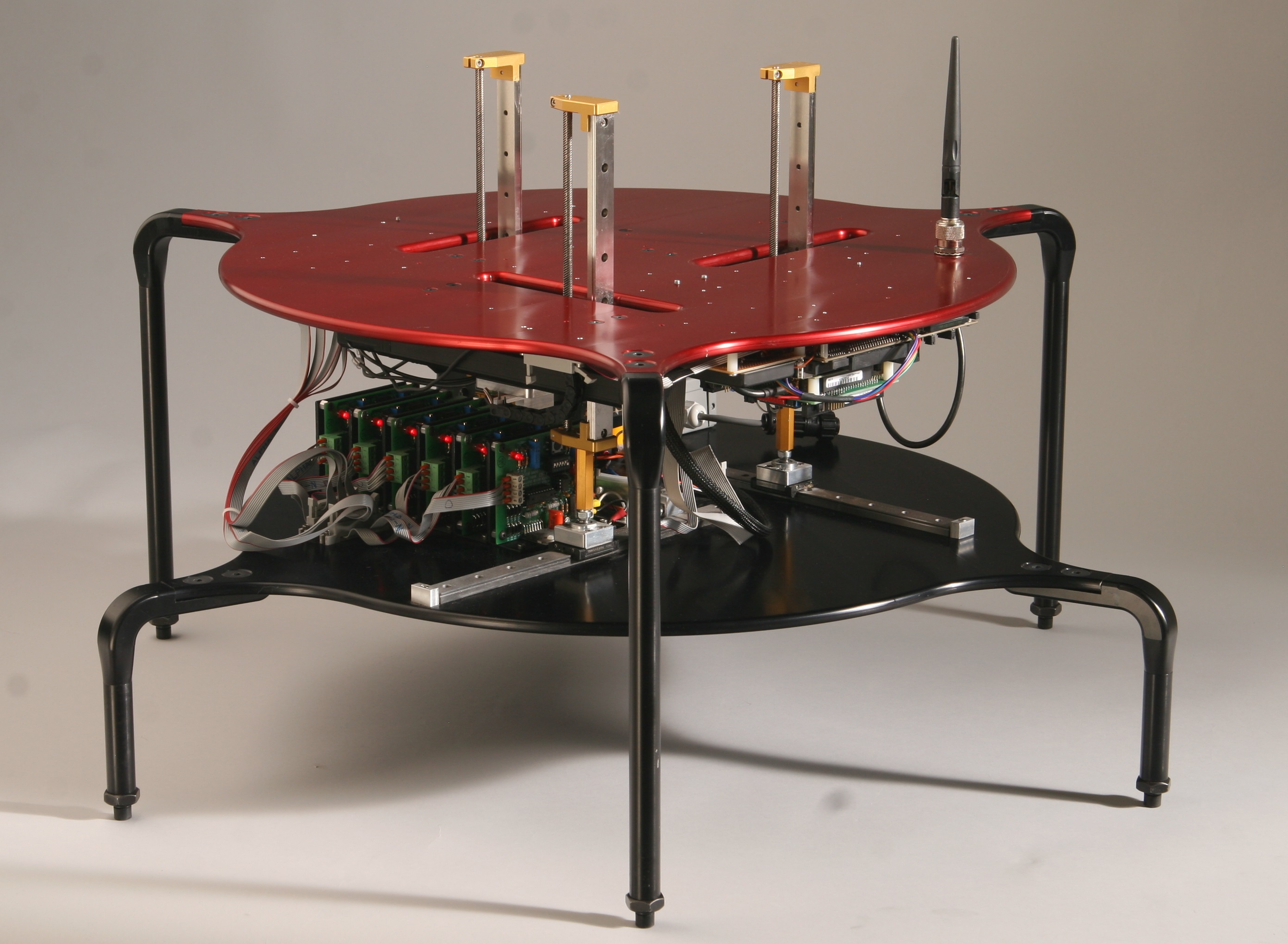
Tri-Sphere Multi-Mode Mobility Platform
The Tri-Sphere's design has been adapted to serve as the foundation for an advanced walking frame: two platforms, each with
three fixed legs, are joined by the manipulator.These robots are capable of moving via a tripod gait along any compass heading and can effectively negotiate rough, unstructured terrain. A Tri-Sphere robot's motion capabilities are identical to those of sophisticated six-legged robots but are achieved with a fraction of the mechanical complexity.
In addition to enhanced mobility, the robot's design allows it to also function as a highly dexterous manipulator. When the three legs attached to the lower platform are provided with the ability to pivot, that platform is transformed into a six-axis gantry. Because of its parallel/prismatic design, a Tri-Sphere robot can employ this gantry to dig, grasp, lift and carry objects weighing many times its weight.
Self-Propelled GPR Ground Penetrating Radar
Square One is exploring the use of Tri-Sphere robots as self-propelled communication nodes and planetary rovers. The US Army is currently sponsoring the integration of ground penetrating radar into a specialized Tri-Sphere robot. The goal is to field autonomous robots capable of accurately locating and marking anti-personnel landmines.